CanBus flashing tool for Esp32
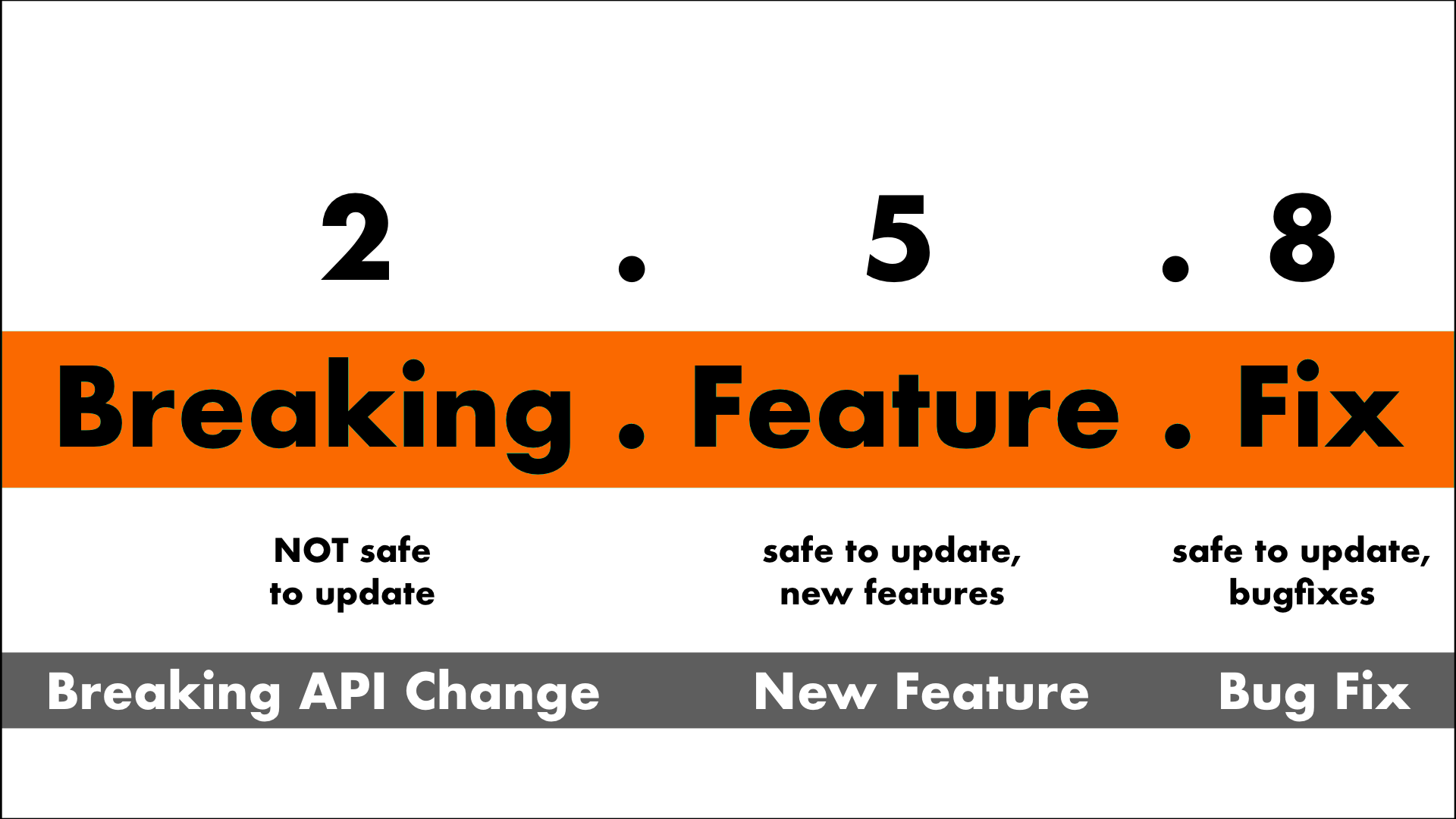
Automated semantic versioning for KiCad with GitLab CiCd
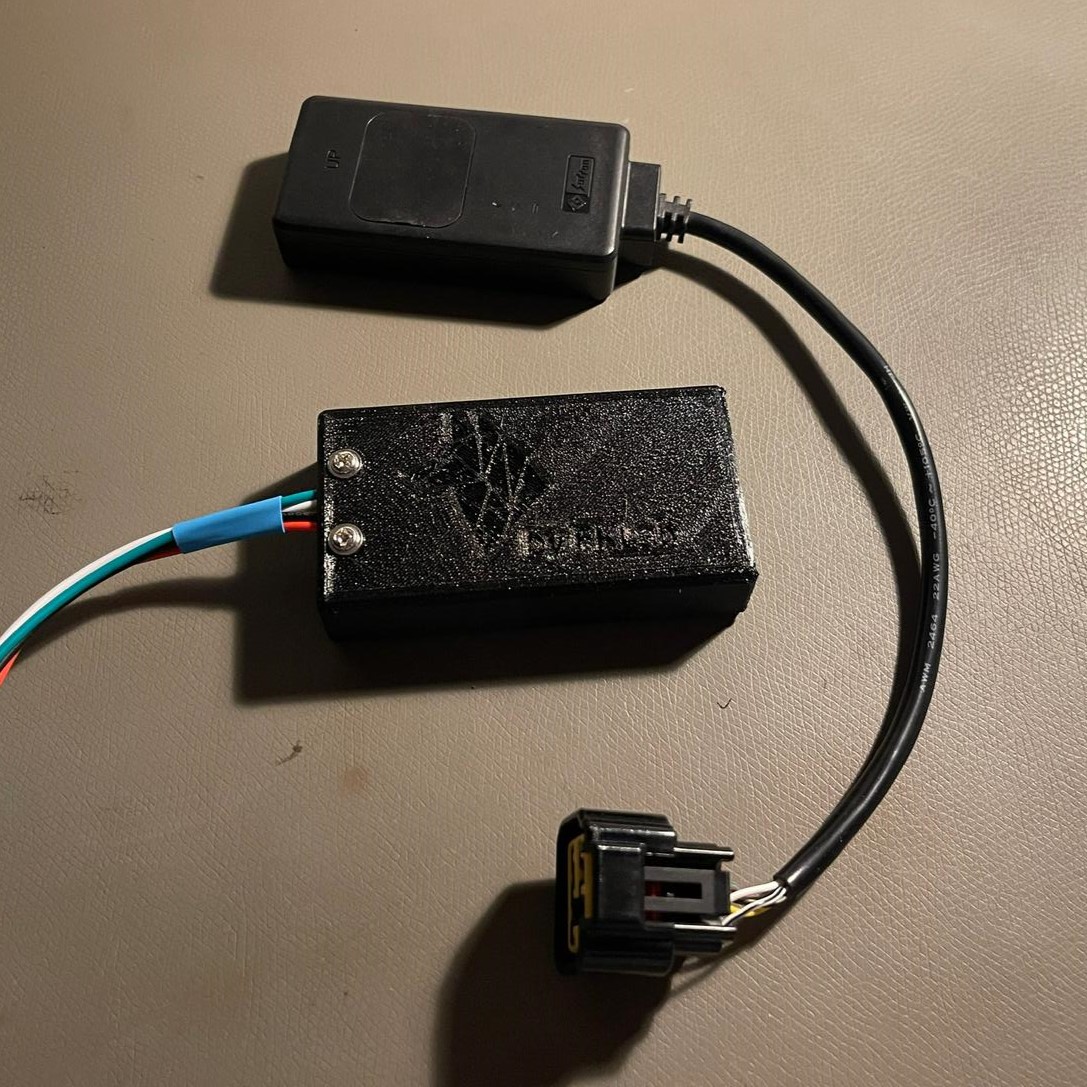
Vehicle tracker with telemetry logging for the Surron UltraBee E-Bike
Reverse engineering of the Surron CAN bus
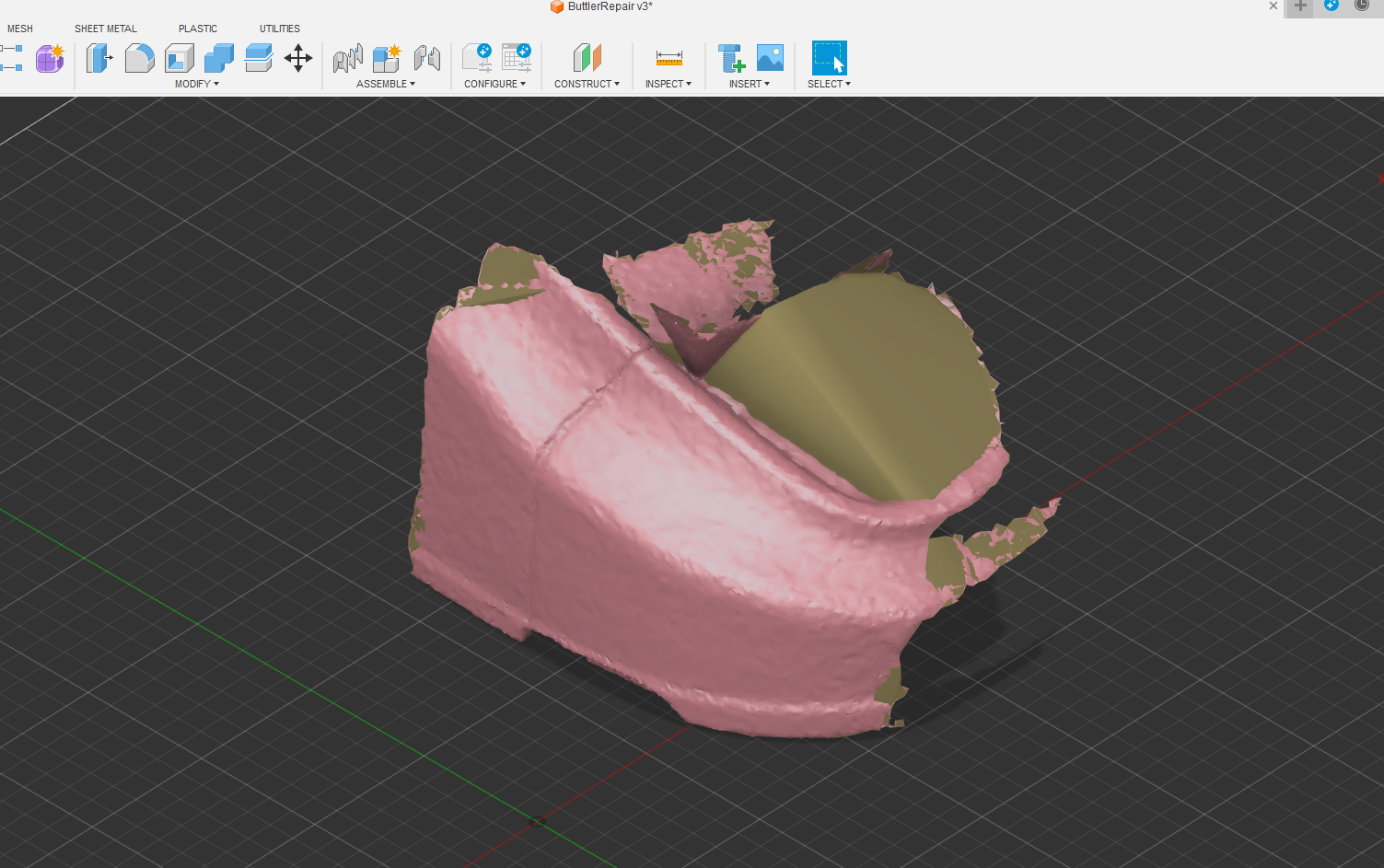
3D Scannen mit dem IPhone um ein Ersatzteil zu Drucken
1
2
3
4